(前回の質問では軽くスルーしたところだったりするのですが)4個目の条件に
> 距離が〇以上離れていること
とありますが,ここでいう「経路間の距離」とは何なのか? という定義を示す必要はないのでしょうか?
実現したいこと
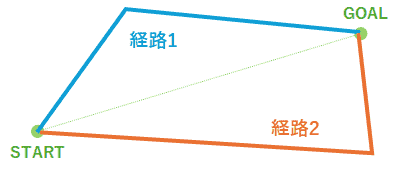
以下の条件を満たす2経路を作成して図示したいです。
以下の絶対条件を満たせば、どのような経路を通っても可とします。
【経路の絶対条件】
- 経路1と経路2は必ず指定された経路長になること
- STARTとGOALは必ず指定された座標位置で固定されていること
例)経路1:START (0,0)、GOAL (10,10)
経路2:START (0,1)、GOAL (10,15) - 1つの経路内で発生する角度は全て130°≦θ≦180°となること
例) 経路1:点m(n-1)と点m(n)を結ぶ線分Aと、点m(n)と点m(n+1)を結ぶ線分Bのなす角が130°≦θ≦180° - 経路1と経路2は交わらず、かつ距離が〇以上離れていること(〇の値は任意で変更可能)
【上記の条件を満たすために追加した制約】
・1つの経路における各点のx座標は、前の点のx座標から0以上となっていること
例) 経路1:m(n)のx座標 ≦ m(n+1)のx座標
※最初に下記ソースコードを作成する際に自分で追加した制約であり、他の方の議論の内容から誤っていると考えられます。
【補足】
目的としましては、START/GOALの座標及び経路長が場合によって変更になるため、変更になった際に条件を満たす経路を1つ作成することを目的としています。
そのため、確実に条件を満たす経路が1つ作成されればそれでOKとなります。(乱数で複数のパターンの経路を作成する必要はありません。)
発生している問題・分からないこと
LLMを使用してソースコードを作成していますが、以下のような問題が発生しなかなか実現できません。
※LLMで作成しているためソースコードもおかしな部分や無駄な部分があるかもしれません。
-
最適解が導出されない(収束しない)
→現在は収束しない場合に"条件を満たす経路が見つかりませんでした。"と表示するようにしているのですが、可能であれば一か八かではなく、100%最適解が導出されるようにしたいです。 -
実行時間が長すぎる
→最適解が可能な限り導出されるようにプログラムを変更すると、とんでもなく実行時間が長くなってしまいます。(1時間以上かかり、それでも最適解が導出されないことがあります。)
現在のプログラムではおそらく難しいのかと思いますが、可能であれば実行時間を短くしたいです。 -
条件を満たさない場合がある
→実行時間を短くしようとしてLLMに相談すると、どうしても条件が厳しいようで条件を緩和しようとします。(特に条件3と4を一度に満たすのが難しいようです。)
ただ絶対条件を満たさなければ意味がないので、条件を緩和するのは難しい状況です。
※ソースコードが非常に長いですがご容赦ください。
該当のソースコード
Python
1import numpy as np 2import matplotlib.pyplot as plt 3 4starts = [ 5 np.array([0, 0]), 6 np.array([0, 1]), 7] 8goals = [ 9 np.array([10, 10]), 10 np.array([10, 15]), 11] 12target_lengths = [40, 40] 13num_points = 15 14 15def calculate_length(points): 16 return np.sum(np.linalg.norm(points[1:] - points[:-1], axis=1)) 17 18def generate_monotonic_x(start, goal, num_points): 19 total_dx = goal[0] - start[0] 20 dxs = np.random.rand(num_points + 1) 21 dxs = dxs / dxs.sum() * total_dx 22 x_points = np.cumsum(dxs) + start[0] 23 x_points = x_points[:-1] 24 return x_points 25 26def check_angle_constraint(points, start, goal, min_angle_deg=130): 27 path = np.vstack([start, points, goal]) 28 min_cos = np.cos(np.deg2rad(180-min_angle_deg)) 29 for i in range(1, len(path)-1): 30 v1 = path[i] - path[i-1] 31 v2 = path[i+1] - path[i] 32 norm1 = np.linalg.norm(v1) 33 norm2 = np.linalg.norm(v2) 34 if norm1 < 1e-8 or norm2 < 1e-8: 35 return False 36 cos_theta = np.dot(v1, v2) / (norm1 * norm2) 37 if cos_theta < min_cos: 38 return False 39 return True 40 41def check_all_constraints(points1, points2, starts, goals): 42 # x座標一致 43 if not np.allclose(points1[:,0], points2[:,0]): 44 return False 45 # y2 > y1+1 46 if not np.all(points2[:,1] > points1[:,1] + 1.0): 47 return False 48 # x座標単調増加 49 if not (np.all(np.diff(points1[:,0]) > 0) and np.all(np.diff(points2[:,0]) > 0)): 50 return False 51 # 角度制約 52 if not (check_angle_constraint(points1, starts[0], goals[0], min_angle_deg=130) and 53 check_angle_constraint(points2, starts[1], goals[1], min_angle_deg=130)): 54 return False 55 return True 56 57def generate_y_seq_with_constraints(x_points, start_y, goal_y, num_points, amplitude=0.5, min_angle_deg=130): 58 # 逐次生成で角度制約を満たすy座標列 59 y_seq = np.linspace(start_y, goal_y, num_points+2)[1:-1] 60 y_points = [] 61 for i in range(num_points): 62 for _ in range(100): 63 y = y_seq[i] + np.random.randn() * amplitude 64 tmp_points = np.array(y_points + [y]) 65 tmp_x = x_points[:i+1] 66 tmp_pts = np.stack([tmp_x, tmp_points], axis=1) 67 if i < 2: 68 y_points.append(y) 69 break 70 else: 71 if check_angle_constraint(tmp_pts, np.array([x_points[0], start_y]), np.array([x_points[i], goal_y]), min_angle_deg=min_angle_deg): 72 y_points.append(y) 73 break 74 else: 75 # 失敗したら再生成 76 return None 77 return np.array(y_points) 78 79max_trials = 10000 80for trial in range(max_trials): 81 # x座標生成 82 x_points = generate_monotonic_x(starts[0], goals[0], num_points) 83 # y1生成(角度制約を満たすまで逐次生成) 84 for y1_trial in range(100): 85 y1_points = generate_y_seq_with_constraints(x_points, starts[0][1], goals[0][1], num_points, amplitude=0.5, min_angle_deg=130) 86 if y1_points is not None: 87 break 88 else: 89 continue 90 # y2生成(y1より十分大きく、角度制約を満たすまで逐次生成) 91 for y2_trial in range(100): 92 margin = 2.0 93 amplitude2 = 0.5 94 y2_base = y1_points + margin 95 y2_points = [] 96 for i in range(num_points): 97 for _ in range(100): 98 y = y2_base[i] + np.abs(np.random.randn() * amplitude2) 99 tmp_points = np.array(y2_points + [y]) 100 tmp_x = x_points[:i+1] 101 tmp_pts = np.stack([tmp_x, tmp_points], axis=1) 102 if i < 2: 103 y2_points.append(y) 104 break 105 else: 106 if check_angle_constraint(tmp_pts, np.array([x_points[0], starts[1][1]]), np.array([x_points[i], goals[1][1]]), min_angle_deg=130): 107 y2_points.append(y) 108 break 109 else: 110 break 111 if len(y2_points) == num_points and np.all(np.array(y2_points) > y1_points + 1.0): 112 break 113 else: 114 continue 115 116 points1 = np.stack([x_points, y1_points], axis=1) 117 points2 = np.stack([x_points, np.array(y2_points)], axis=1) 118 119 # 経路長微調整 120 for adjust_trial in range(100): 121 # 経路長計算 122 path1 = np.vstack([starts[0], points1, goals[0]]) 123 path2 = np.vstack([starts[1], points2, goals[1]]) 124 len1 = calculate_length(path1) 125 len2 = calculate_length(path2) 126 # 長さ調整 127 diff1 = target_lengths[0] - len1 128 diff2 = target_lengths[1] - len2 129 # y座標に均等分配 130 points1[:,1] += diff1 / num_points 131 points2[:,1] += diff2 / num_points 132 # 制約再チェック 133 if check_all_constraints(points1, points2, starts, goals): 134 # 最終チェック 135 path1 = np.vstack([starts[0], points1, goals[0]]) 136 path2 = np.vstack([starts[1], points2, goals[1]]) 137 if (abs(calculate_length(path1) - target_lengths[0]) < 1e-6 and 138 abs(calculate_length(path2) - target_lengths[1]) < 1e-6): 139 break 140 else: 141 continue 142 # すべて満たしたら終了 143 break 144else: 145 print("条件を満たす経路が見つかりませんでした。") 146 147path1 = np.vstack([starts[0], points1, goals[0]]) 148path2 = np.vstack([starts[1], points2, goals[1]]) 149 150print(f'経路1の長さ: {calculate_length(path1):.8f}') 151print(f'経路2の長さ: {calculate_length(path2):.8f}') 152print(f'全ての中間点でx座標一致: {np.allclose(points1[:,0], points2[:,0])}') 153print(f'全ての中間点でy2>y1+1: {np.all(points2[:,1] > points1[:,1] + 1.0)}') 154print(f'経路1なす角制約: {check_angle_constraint(points1, starts[0], goals[0], min_angle_deg=130)}') 155print(f'経路2なす角制約: {check_angle_constraint(points2, starts[1], goals[1], min_angle_deg=130)}') 156 157plt.plot(path1[:, 0], path1[:, 1], marker='o', label='Path 1') 158plt.plot(path2[:, 0], path2[:, 1], marker='o', label='Path 2') 159plt.plot(starts[0][0], starts[0][1], 'ro') 160plt.plot(goals[0][0], goals[0][1], 'go') 161plt.plot(starts[1][0], starts[1][1], 'ro') 162plt.plot(goals[1][0], goals[1][1], 'go') 163plt.title('Paths with All Constraints') 164plt.xlabel('X-axis') 165plt.ylabel('Y-axis') 166plt.legend() 167plt.grid() 168plt.show()
試したこと・調べたこと
- teratailやGoogle等で検索した
- ソースコードを自分なりに変更した
- 知人に聞いた
- その他
上記の詳細・結果
LLMに質問したり、自分で様々なアルゴリズム等を調べて変更をかけていますが、未だに上記の課題を解決できていません。
補足
自分がアルゴリズム等にあまり明るくないため、このようなアルゴリズムが良い等のアドバイスがございましたらぜひご意見をお願いいたします。
以前もご回答いただきありがとうございました。
ご確認なのですが、ご質問の意図としては
・「経路間の距離」とはどの部分を指しているのか
という認識で合っておりますでしょうか?(認識が間違っていたら申し訳ございません)
自分が満たしたい条件としては、
・経路1で作成される線分と経路2で作成される線分の最短距離が〇以上(例えば1以上)
として考えております。
最も近い部分の距離が1以上であれば、それ以外の部分はどれほど離れていても問題なしとしています。
実際に自分が作成したソースコードでは、この条件を満たすために
・経路を構成する点のx座標を経路1と経路2で一致させる
・経路1を構成する点のy座標 ≦ 経路2を構成する点のy座標 +1 (経路2のy座標が経路1のy座標の1以上)
という方針にしています。
ただ、あくまで自分が達成したい条件は
・経路1で作成される線分と経路2で作成される線分の最短距離が〇以上とすること
なので、自分が考えた方針以外でも方法があればそれを試したいと思っています。
長くなってしまい申し訳ございません。
質問の意図に反していましたら教えてください。
> 130°≦θ≦180°
ものすごくギザギザしたノコギリの歯みたいなイメージなんでしょうか.
> 経路間の距離
2つの経路が{START, GOAL}という2点を共有しているとしたら,距離は0になっちゃうのでは…? と疑問に思ったのです.
そこの部分を除外して :例えば2つの経路が
START - 頂点a - 頂点b - ... - 頂点n - GOAL
START - 頂点A - 頂点B - ... - 頂点M - GOAL
だとしたら
頂点a - 頂点b - ... - 頂点n
頂点A - 頂点B - ... - 頂点M
の部分だけで
最近接個所での距離を考える……みたいな話ってことでしょうか.
> ものすごくギザギザしたノコギリの歯みたいなイメージなんでしょうか.
→自分のイメージとしましては、絶対条件1に経路長を調整する項目がありますので、経路長を調整しようとするとどうしてもギザギザするような部分が出てきてしまうため、その部分の角度を調整したいということでこの項目を追加しています。
一定間隔である必要はありませんので、のこぎりのように周期的である必要はないのですが、角度の制約はどうしても必要で、130°以下(例えば90°等)になってしまうと、別の業務で不都合が起きてしまうため設定しています。(今回作成した経路を別の業務で使用するためです)
> 2つの経路が{START, GOAL}という2点を共有しているとしたら,距離は0になっちゃうのでは…?
こちらは完全に自分の説明不足でした。申し訳ございません。
ソースコードの方に記載しているのですが、経路1と経路2はSTARTとGOALの点を別々に設定してあります。
starts = [
np.array([0, 0]),
np.array([0, 1]),
]
goals = [
np.array([10, 10]),
np.array([10, 15]),
]
そのため、初めは最短距離1でSTARTしてそこから経路を作成していくようなイメージです。
このSTART間の距離よりも経路が近くならないようにしたいという意図になります。
説明不足で申し訳ございません。
>・経路を構成する点のx座標を経路1と経路2で一致させる
>・経路1を構成する点のy座標 ≦ 経路2を構成する点のy座標 +1 (経路2のy座標が経路1のy座標の1以上)
これ、距離が1以下になリますよ
(0,0)-(1,1) と (0,1)-(1,2) :: (0,0) 、(0,1) から45度の線分 の距離は 1 ではなく0.707 です
なるほど、確かにおっしゃる通りですね。
少し設定条件を見直したいと思います。
ありがとうございます。
これって
* 実行毎に(乱数とかが絡んで)異なる結果が生成されてほしいって話なのか,
* とにかく指定された条件を満たす解が出てきさえすればよい(:同一の条件を入力したら同一の解が出てくるのでよい)という話なのか,
……とか,そういうのが質問文に明言されてる方が良いんじゃないかな.
(私はなんとなく 前者側なのかな? と捉えてましたが果たして…?)
その通りですね。
いろいろと説明が不足しており申し訳ございません。
実は後者になります。
確実に条件を満たす経路が1つ作成されればそれでOKというのが前提条件になります。
なぜこれを作成する必要があるかというと、
・START/GOALの座標
・経路の長さL
が場合によって変化するためです。
上記2つの条件が変わった時に実行して条件を満たす経路が作成されれば目的達成となります。
説明不足で申し訳ございません。
いまいち判らなかったので、条件の把握の為ソースを読んでみたのですが
30,31行v1,v2なんですけど、これだと直線で進むと180度でなく、0度なりませんか?
読み間違ってる?
コメントありがとうございます。
申し訳ございません、自分もLLMに作成してもらっている身なので、自分の認識が間違っている場合は教えてください。
30 v1 = path[i] - path[i-1]
31 v2 = path[i+1] - path[i]
この行のお話でしょうか?
この行の自分の認識としましては、
v1:1つの経路におけるm(n-1)とm(n)を結ぶ線分
v2:1つの経路におけるm(n)とm(n+1)を結ぶ線分
を指していると考えています。
そして次の32, 33行目でベクトルnorm1, norm2に変換し、36行目のcos_thetaで2つのベクトルの内積を計算します。
最後に
37 if cos_theta > min_cos: #min_cos:θ=130°の時の内積
38 return False
で条件を満たすまで繰り返していると解釈しました。
自分の解釈が間違っている、この部分を修正した方が良い等ありましたら教えてください。
確かに何か判定が変な気がしますね.
2つのベクトルの方向が
[i-1] -- v1 --> [i] -- v2 --> [i+1]
という形なので,
その v1 と v2 の内積から cosΘ を求めたとしたら,この Θ とは「進行方向の変化量」みたいな角度になる(ので,直線状態の場合が 0 度という話になります).
この Θ について言えば,「進行方向の変化量Θは 180-130=50度 よりも小さくあるべし」という条件をチェックすることになる.
cos値に関してこの条件を言い直せば
「 cosΘ >= cos( 50度 ) たるべし」ということになるかと.
↓
すなわち,False とする条件は
cosΘ < cos( 50度 )
かな?
なるほど、自分が内積の捉え方を間違っていたかもしれません。
確かにこのベクトルの向きだと直線状態が0°となりますね。
修正しておきます。
ご指摘いただきありがとうございます。
>他の言語を使用することも考えています
いまは アルゴリズムを考えている所なので言語の浮気より 思いついたアルゴリズムを速やかに確認できる一番得意な言語で進めるのがよいと思います。
浮気を考えるのは アルゴリズムはできたがおそすぎる という時に。
その通りですね。
まずはpythonで解を導出できるようになってから実行時間の面を気にしたいと思います。
コメントいただきありがとうございます。
どういう問題か、少しわかったが、解法は思い浮かばないw
難しいケースだと
経路1スタートゴール結ぶの直線と経路2スタートゴール結ぶの直線がクロスしている場合もあるってことですよね。その場合、どちらかが迂回しないといけないのですね。
> 難しいケースだと
ただ「一般的な(←不特定な入力を扱えるという意味で)アルゴリズム」を考えたい,っていう話であれば,まぁすべてのケースを考える必要があるわけですが……
何かしらの実用する物を必要としている場面であれば,「どこまで考えなきゃならないのか? =どこまで考えれば用途上十分なのか」みたいなのを絞った方が良いんじゃないか,という気もしますね.(言うまでもなく,それによって難易度が下がるのならば,ですが.)
使う場面次第では「実用上はこんな範囲の入力しか無いという想定でいても全く問題ないので,実用範囲の外側な入力については Don't Care(簡単なチェックで最初に弾かれたり,バグったり,変な結果が出たり,無限ループになるかもしれない) 」みたいなものでも許容できるかもしれないわけで.
(「業務」という言葉が出てきている様子なので,難易度的に手に負えない話であれば,その辺の条件を詰めた方が良いのではないだろうか説.
単にコメントしたりしてるだけの第三者としては「一般的なアルゴリズム」を想定した話を楽しんでても全然良いんだけども,ご本人は立場的にそうもいかないでしょうし?)
例えば入力についても,「START と GOAL だけを指示」という形態が「理想」なのだとして,現実的には,少なくとも現時点ではそれだときついので「今今は 経由点を何点か追加で人間が指定してくれ」みたいな方向に持っていけないのか? とか.
(「迂回しないと」みたいなのは,とりあえず暫定的に,人間の判断で対応する的な)
たくさんコメントいただきありがとうございます。
たくさんの意見非常に参考にさせていただいております。
私事で恐縮ですが、年末年始休暇に入り年明けまでPCを立ち上げませんので、年明けから検討を再開させていただきます。
申し訳ございませんが、よろしくお願いいたします。
「解法は思い浮かばない」までの経緯w
とりあえず、直線を目的に長さにする方法を考える。
難しいのでとりあえず長さを増やし目的の距離を越えることが可能かを考えた。
角度の変化は±50度、(X軸との角度)絶対角度は±90度(バックしない)と表す
プログラムにある例のデータ
経路 長さ=40 経路間距離1
経路A(0,0)-(10,10)
経路B(0,1)-(10,15)
当初
経路A 40÷14.142 = 2.82 倍
50度で1/cos(50) = 1.5倍にする
log(2.82)/log(1.5)= 2.55
再帰的に3回分解すれば、いけるのかなと思ったが・・・
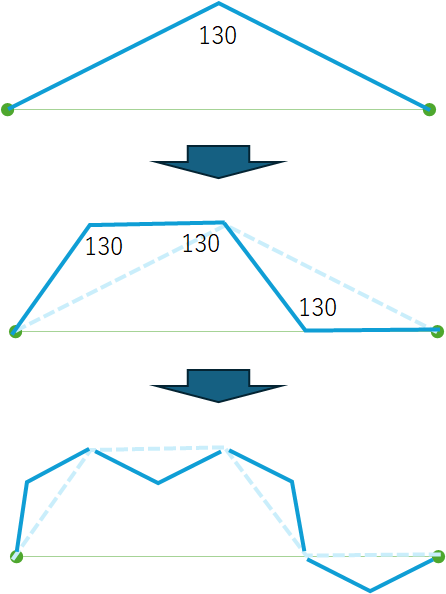
まず、ここの回答にある考え方をもとに考える(仮に三角形分解方法とする)
直線を2つに分解する(二等辺三角を考える)
角度が高い方が距離が稼げるので高い角度がよいと考え、
最大の50度にすると三角形の頂点が80度と制限の130度より鋭利な角度になる。
25度にすると130度でセーフだけど、今度は距離が稼ぎにくくなる。
再度1/cos(25)で計算すると10.53回、11回以上必要になる。
分解できないことケースも考えると・・・あきらめる
三角形ではなく台形にしてみる(のぼりとくだりは同じ大きさの角度)5つの線分にした
50度でいけるが、バックしてはいけないがネックになる。(多分、三角形でも)
例(0,0)-(10,10)だと45度なので最初の分解で50度だと絶対角度95度となり90度を越え
バックしてしまうので越えない角度にする必要がある。(この場合45度)
その角度が小さい時は分解をあきらめる。
実際に、この直線の分解を再帰的に行ってみた
バックしてはいけない為、予想していた(フラクタル図?)経路とは違い、
変な線、というよりもう曲線!そしてもうひとつの経路を同じように処理、2経路の制限満たしていないw
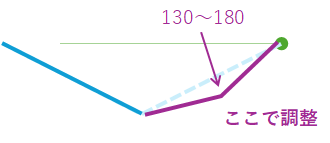
曲線をみて思いつく!?!
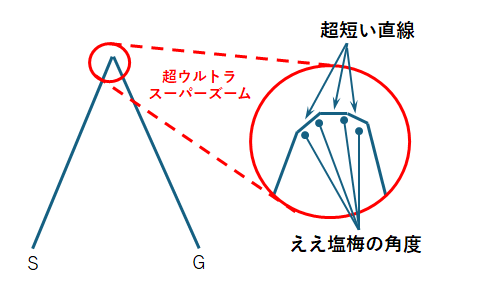
変化±50度の角度無視して、まずは2つに分解して、鋭角のところを極小の面取りをするように
後処理すればよいのではないか?
考え方は結構シンプル!線分少ない(面取りで短くなった分の微調整は、まともに考えてないが)
最小の線分長が制限がないので、いけるのではないか?
しかし、2経路の距離制限が角度制限にもでてくることが気が付き、それどころじゃない!
例の経路Aで考えるとスタート地点がすでに制限距離ぴったりなので、最初の線分の角度は、別のスタート地点からの制限距離円の接線より
大きくなくてはならず、角度が45度以上必要になる25度までの三角形分解方法は最初から分解できない。
台形では・・・そもそも、スタートゴールを直線で引いてしまった時点で絶対条件4を満たさない直線なので、それを分解したところで・・・
と、思い浮かばないになりました。
返信が遅くなり申し訳ありません。
様々な手法でご検討いただきありがとうございます!
非常に参考になります。
> 分解できないことケースも考えると・・・あきらめる
分解できないケースというのは、距離的に短すぎて分解できない、というようなイメージでしょうか?
回答にある三角形分解方法でも実現できない場合があるということでしょうか?
> 分解できないことケースも考えると・・・あきらめる
分解できない線分ケースです。11回とかいうレベルで終わらなかったということです。
分解できない線分(縦線、もしくは縦線に近いく分解すると戻りが発生する線分)が増えて分解できる分でさらなる分解してもあまり増加しなくなります。線分の数が増えすぎて、数が100万とかになってしまう。(今、考えなおすと、これだけ分解するのは情報落ちも発生していると思う)ポンコツPCでは、重くてなんども計算するのは、大変なのであきらめた。※経路長を計算するとき情報落ちを考慮した加算を行わないといけない線分の数です。
全部分解できるなら1つ1つの線分短くなるので分解で増加する量は微量でも分解できる線分の数が増えるはずだったけどそうでもなかった。
経路間の距離は、check_all_constraintsのy+1で、計算できず、線分の距離で計算しないといけないので、この計算量も物凄く増える。
でも、一応、線分が分解すれば増えるので、絶対条件1を後回しに、まずは、経路2つを最短距離で結ぶ方法からかなと思います。分解して経路を縮めることはできませんからね。絶対条件5も面取りみたいにすれば、何とかなるかも。(考えてないともいうw)。
絶対条件2,3,4からで、まずは、スタートゴールを結んだ線分で、線分間の距離が1未満のケースは、迂回する経路を考えないといけない。
距離1の場合は接してるので難しい極小でも近づくと未満になってしまうのでなにか考えないといけない。線分の分解を考える時に、別の経路のことを考えたくないw
今回の例はスタート地点の距離が1なので単純な分解は難しい。
再帰を検討したり累積誤差を懸念したりされてますが、、、
私も始めは同じでしたが fana さんのやり方を工夫すると解析的に解が得られます。
その解を元に経路を図化するのはまた厄介かも、ですが。
私の 2025/12/27 00:51 の回答の方法で経路を求めると
「始点終点間の距離の100倍の経路長の経路」を求めるのに
cos 2回
arccos 1回
log 2回
累乗 1回
掛算 3回
割算 4回
足算 0回
引算 1回
の演算で
頂角130度で 46回折りたたみを行い
47回目の折りたたみを 頂角 134.81056774232337 度で行えばよい
ことが求められます。
始点終点距離の100倍の経路を求める計算
頂角130度の三角形の経路を作ると 1/cos(25) 倍の経路長となります
1.0/Math.cos(Math::PI * 25.0/180) => 1.1033779189624917
log にしておきます
Math.log10(1.1033779189624917) => 0.042724288513601466
start-goll の距離の100倍の経路を求めるとします。logにすると
Math.log10(100) => 2.0
2.0 / 0.042724288513601466 => 46.811780127439484
折り曲げを 46回以上47回未満行うことになります
46回行うと何倍になるか
1.1033779189624917 ** 46 => 92.32456532664767
次の折り曲げで何倍にすればよいのか
100 / 92.32456532664767 => 1.083135345898422
これは COS(25) でなく 何度にすれば良い?
1.083135345898422 = 1.0/Math.cos(θ)
∴ θ = arccos(1.0/1.083135345898422)
Math.acos(1.0/1.083135345898422) * 180/Math::PI => 22.59471612883831
47回目の折り曲げは底角 22.59471612883831 すなわち 頂角
180 - 22.59471612883831 * 2 => 134.81056774232337 度にすればよい
ここまで以下の演算で答えがでます
cos 2回
arccos 1回
log 2回
累乗 1回
掛算 3回
割算 4回
足算 0回
引算 1回
絶対条件3のバックしては、いけない制限があり。角度でいえばX軸の増加方向が0度だとすると±90度で納めないといけません。また、経路長を伸ばした後でこのバックを修正することも難しいと考え、伸ばす時点で考慮した方がよいと考えます。
なので、すべての線分を再び折り曲げで伸ばすことができないのです。単純に1/cos(25)倍1/cos(25)倍となっていかなのです。可能な線分だけか、もっと小さな角度でするなどありますが、回数が増えてきます。
crapemyrtle さんに向けてのコメント後ろにあります
tmpさん
そこは承知しています。そして 数学的というか プログラム問題 として捉えるときには考慮すべき点だということも承知しています。 ただ、90 - 25 度よりも傾斜がきついときも手はあります、
が、
crapemyrtle さんの課題としては そこまで傾斜がきついことはなかろうと思ってます。「バックはだめよ」というのは 「後戻りして距離を稼ぐのはだめ」ということでしょうから。
ということで crapemyrtle さん
与えられた課題の 条件範囲を開示してください。それが無いので不必要に厳密な議論になってるかも
(1) 指定された経路長 / スタートーゴール距離 比の最大値 はいくつですか?
(2) Start-Goal の傾斜の最大角はいくつですか?
(3) 2つの Start-Goal の線分の距離 / Start-Goal距離 比 の最小値はいくつですか?
この3点がある範囲に収まるなら「この方法で制約破りになる可能性は2つ」も tmp さんの懸念も 考慮不要になるので
前言訂正
crapemyrtleさん、「1つの経路における各点のx座標は、前の点のx座標から0以上となっていること」これ命題と違ってません? 「goal方向に対して下がらない」を翻訳してません? goal方向が45度だったら それに対して ±90度以下、つまり -45 〜 90 度の範囲 ではないですか?
tmpさん
仮にS⇒G が0度であっても 私の方法をそのままやると 90度以上になってしまう。
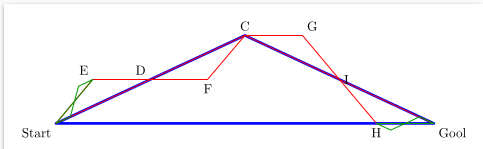
S⇒E の間の緑の線の最大傾斜は 75度なのでここを同じ方法で分割すると100度の線ができてしまう
同じことが CF にも ED,DF、CGの水平線に作った曾孫にも起きる。
発生場所が計算で出るなら解析的に求められるが計算量は増えますね。
質問を読んでいて何となく思ったのですが、5つほど載っている「絶対条件」は、本当にあなたが「実現したいこと」の絶対条件なのでしょうか。
あなたが勝手に決めつけた、単なる「制約」だったりしませんか?
もしそうであるならば、一旦「マストで実現しなければならないこと」を明確にした方が、より広く実現方法を得られるのではないかと思います。
前回の質問の「実現したいこと」にある画像を最終ゴールとして捉えるならば、この質問にはかなりの矛盾があるように感じたのでコメントしてみました。
私の見当違いでしたらごめんなさい。
※前回の質問: https://teratail.com/questions/uw62wkx1tn7rfj
winterboumさん
momodxさん
バタバタしておりしばらくこちらを確認することができておりませんでした。
申し訳ございません。
コメントいただきありがとうございます。
お2人のおっしゃる通り、真の絶対条件と自分の考える制約がごちゃごちゃになってしまっているようです。
絶対条件を満たすためには必ず必要だと自分なりに考えた制約を追加してしまっていました。
質問内容を真の絶対条件に変更しておきます。
自分では気づけなかった点でした。ご指摘いただきありがとうございます。
わからん!
上記の条件を満たすために追加した制約 になっていない。
制約として上げられてるものすべて、それに抵触しても 絶対条件 は満たせる と思うが。
「絶対条件 だけではつまらんから 制約つけてもっと難しくしよう」 ということならわかるが
> 経路1と経路2は交わらず、かつ距離が〇以上離れていること
この条件が必須なのか否かによって,話が全く変わってしまう気がしますが…?
(この条件が無い場合,経路1と経路2というのは互いに全く独立な存在になってしまうような?)
fanaさん
その通りですね。
申し訳ありません、こちらは絶対条件でした。
バタバタしていたため自分でも整理できていないようです。
修正しておきます。
ありがとうございます。
winterboumさん
説明が言葉足らずで申し訳ございません。
上記の通り制約と絶対条件をうまく仕分けできていませんでした。
また、誤っているのではと指摘いただいた制約条件に関しては、あえて残しています。
(元々記載しているソースコードにこの制約条件を追加していたため、今後初めて自分の質問を見た方が意図を把握できるようにするためです)
上記の修正でもまだ意図が伝わりづらいという場合は、申し訳ありませんが再度ご指摘ください。
よろしくお願いいたします。