
「うまくいかない」のひとことではなく、
こうなることを期待して、
こうしたら、
こうなった(この部分が期待と異なる)
というそれぞれの「事実」を記載してください。
---
質問とは関係ないですが、!を多用した文章を見るととてもイライラします。どうしても付けたいというのなら止めませんが、そういう印象を持つ人がいるということは知っておいて欲しいです。
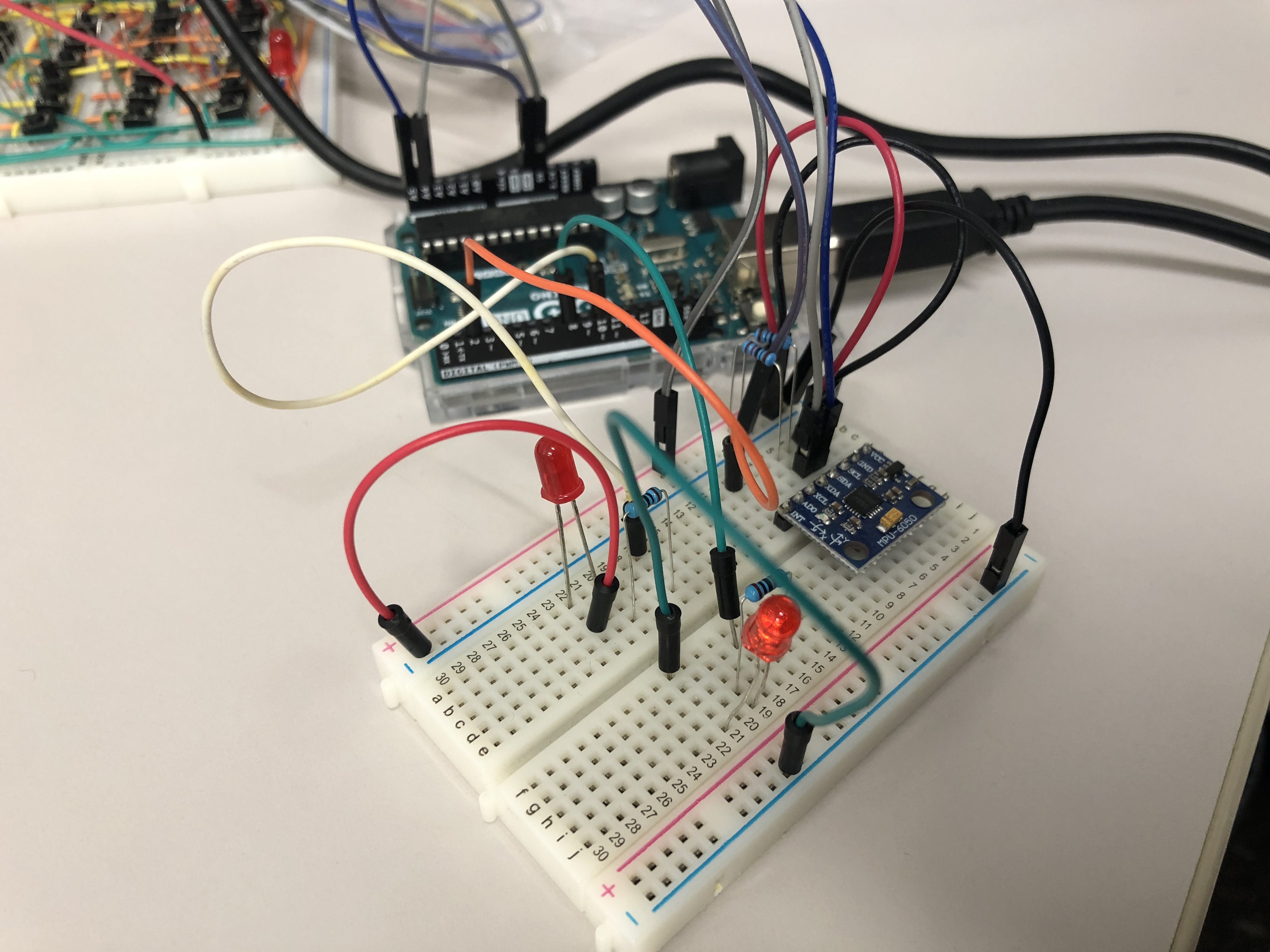
【現状】傾けた側のLEDが光る回路
添付した画像は6軸センサ(MPU6050)とLED2つを使って作った回路なのですが、「左右に傾けると傾けた側のLEDが点灯する」ようプログラムしています。実際に使用しているコードは下に添付してます。
(元々前後左右の4方向のLEDだったものを2つのみ動くようコードを変えました。)
【画像ではArduino Unoを使ってますが、実際はHID機能のついたPro Microを使います】
【相談内容】傾ける方向によって違う文字が連打されるように
自分はこの回路とコードをベースにして、LEDではなく「左右に傾けると傾ける方向によって違う文字がパソコン上で連打される(左に傾けると"w"、右に傾けると”笑”と連打されるみたいな感じです)」ようにコードを書き換えたいです
しかしやり方が悪いのかうまくいかないので知識のある方に相談したいです
自分なりに考えてみたこと
- 自作キーボードを作るときに使う〈Keyboard.h〉のライブラリを使えばできると考えています。
- コード後半の「digitalWrite〜」の部分を「 Keyboard.press('w')」とかに変えればいい?など色々試していました。
〈keyboard.h〉ライブラリの詳細がまとめてあるサイトを下記に添付させていただきました。
https://www.arduino.cc/reference/en/language/functions/usb/keyboard/
//MPU6050_角度で2方向のLEDを点灯させる #include "I2Cdev.h" #include "MPU6050_6Axis_MotionApps20.h" #include "Wire.h" const int PIN_INTERRUPT = 2; const int PIN_LED1 = 8; const int PIN_LED3 = 10; MPU6050 mpu; bool dmpReady = false; uint8_t mpuIntStatus; uint8_t devStatus; uint16_t packetSize; uint16_t fifoCount; uint8_t fifoBuffer[64]; Quaternion q; VectorFloat gravity; float ypr[3]; volatile bool mpuInterrupt = false; void dmpDataReady() { mpuInterrupt = true; } void setup() { Wire.begin(); Wire.setClock(400000); mpu.initialize(); pinMode(PIN_INTERRUPT, INPUT); while(!mpu.testConnection() ){ } devStatus = mpu.dmpInitialize(); if (devStatus == 0) { mpu.setDMPEnabled(true); attachInterrupt( digitalPinToInterrupt(PIN_INTERRUPT), dmpDataReady, RISING); mpuIntStatus = mpu.getIntStatus(); dmpReady = true; packetSize = mpu.dmpGetFIFOPacketSize(); } pinMode( PIN_LED1, OUTPUT); pinMode( PIN_LED3, OUTPUT); digitalWrite( PIN_LED1, LOW ); digitalWrite( PIN_LED3, LOW ); } void loop() { if (!dmpReady) { return; } while (!mpuInterrupt && fifoCount < packetSize) { } mpuInterrupt = false; mpuIntStatus = mpu.getIntStatus(); fifoCount = mpu.getFIFOCount(); if ((mpuIntStatus & 0x10) || fifoCount == 1024) { mpu.resetFIFO(); } else if (mpuIntStatus & 0x02) { while (fifoCount < packetSize){ fifoCount = mpu.getFIFOCount(); } mpu.getFIFOBytes(fifoBuffer, packetSize); fifoCount -= packetSize; mpu.dmpGetQuaternion(&q, fifoBuffer); mpu.dmpGetGravity(&gravity, &q); mpu.dmpGetYawPitchRoll(ypr, &q, &gravity); float pitch = ypr[1] * 180/M_PI; // 傾きに合わせてLEDを点灯 if( 70 < pitch && pitch < 150 ){ digitalWrite( PIN_LED3, HIGH ); digitalWrite( PIN_LED1, LOW ); } else if( -150 < pitch && pitch < 0 ){ digitalWrite( PIN_LED1, HIGH ); digitalWrite( PIN_LED3, LOW ); } else { digitalWrite( PIN_LED1, LOW ); digitalWrite( PIN_LED3, LOW ); } } } コード
回答1件
あなたの回答
tips
プレビュー


