フィルタ: 側で
RとQに添え字tがついていないですけど時間変化すべきものではないでしょうか。
今カルマンフィルターを使おうとしており、ノイズを状態変数と同時に推定する方法を勉強しています。
最尤推定法で推定する方法はわかったのですが、リアルタイムで同時に推定したいと考えており、以下のURLで自己組織化型状態空間モデルの存在を知りました。これをカルマンフィルターに適用しようとしているのですが、計算方法がわかりません。
https://www.jstage.jst.go.jp/article/jjsai/16/2/16_300/_pdf
https://staff.aist.go.jp/naoyuki.ichimura/research/nng_ssm/papers/sossm_cvim01july.pdf
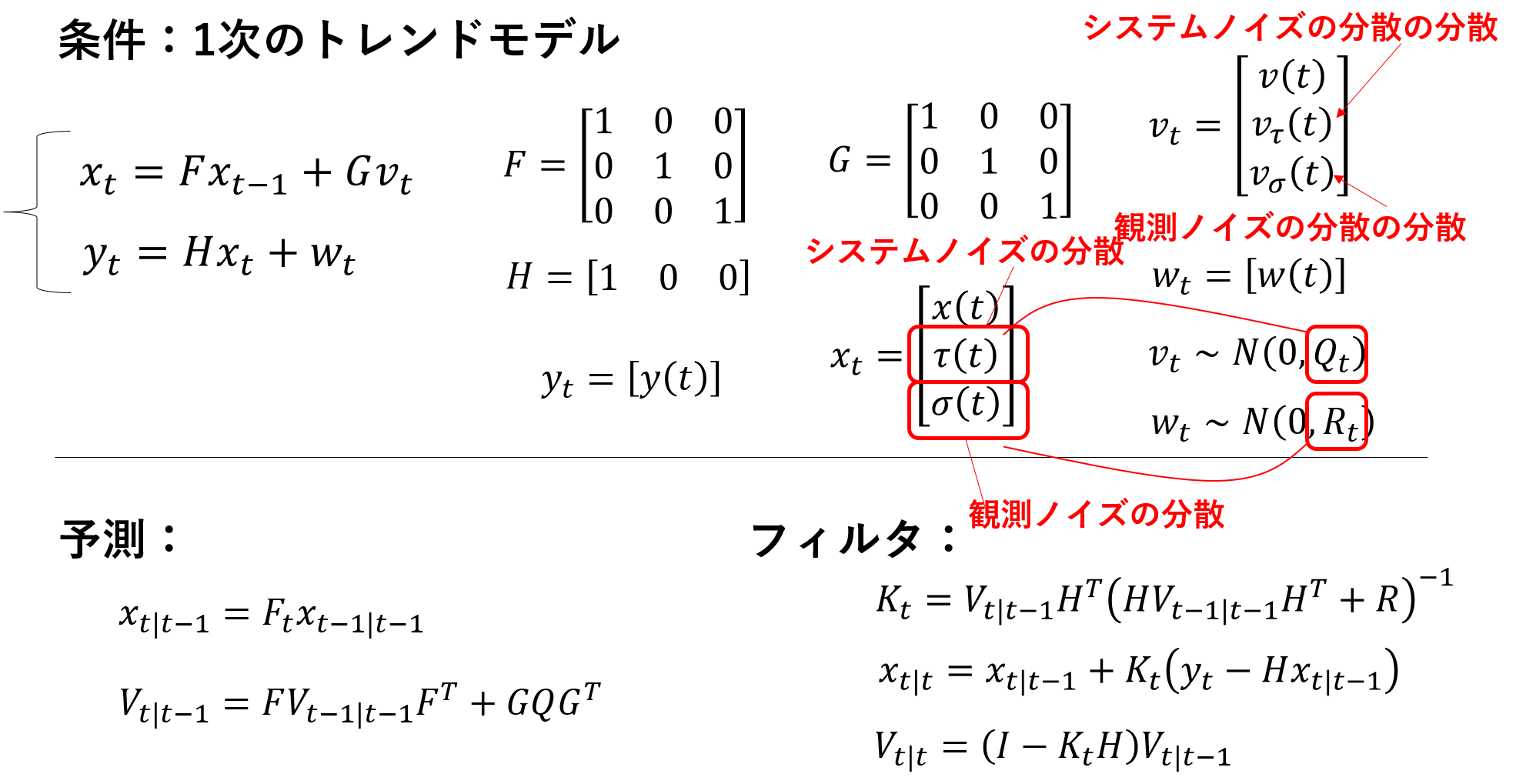
添付の図のように各種条件を設定したのですが、このままだと手で計算してもxtに設定した2つのノイズ(システムノイズの分散と観測ノイズの分散)成分を求めることができません。具体的には更新しても当たり前ですが、値が変わらないです。GやFの設定が間違っている?、予測フィルタステップ以外にノイズを更新する手続きが必要?な気もしているのですが、よくわかっておりません。
もし具体的な手順をご存知であれば教えていただけないでしょうか。
よろしくお願いいたします。