

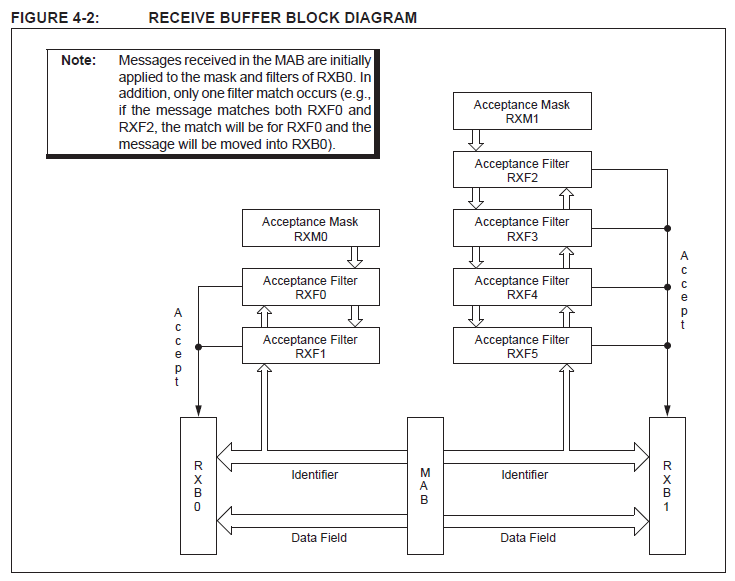
CAN.init_Mask()関数の第一引数が0と1で2つあるのですが、違いって何なのでしょうか?
質問
下記ソースコードを書き込んだ後、別のArduinoから1ms間隔で0x000~0x7ffのIDのCAN信号を送信すると、
IDが4,5,6,7,8,9,404,405,405,406,407,408,409だけ受信できました。
IDが4,5,6,7,8,9はCAN.init_Filt()関数により完全一致するIDのため受信できたとわかるのですが、
404,405,405,406,407,408,409がなぜ受信できたのかわかりません。
CAN.init_Mask()関数によるものだとはわかるのですが、その関数の仕組みがわかりません。
なぜID:404,405,405,406,407,408,409が受信できたのか教えてください。
またCAN.init_Mask()関数の使い方を教えてください。
ソースコード
Arduino
1// demo: CAN-BUS Shield, receive data with interrupt mode, and set mask and filter 2// 3// when in interrupt mode, the data coming can't be too fast, must >20ms, or else you can use check mode 4// loovee, 2014-7-8 5 6#include <SPI.h> 7#include "mcp_can.h" 8 9/*SAMD core*/ 10#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE 11 #define SERIAL SerialUSB 12#else 13 #define SERIAL Serial 14#endif 15 16// the cs pin of the version after v1.1 is default to D9 17// v0.9b and v1.0 is default D10 18const int SPI_CS_PIN = 9; 19 20MCP_CAN CAN(SPI_CS_PIN); // Set CS pin 21 22const byte interruptPin = 0; 23unsigned char flagRecv = 0; 24unsigned char len = 0; 25unsigned char buf[8]; 26char str[20]; 27 28void setup() 29{ 30 SERIAL.begin(115200); 31 32 while (CAN_OK != CAN.begin(CAN_500KBPS)) // init can bus : baudrate = 500k 33 { 34 SERIAL.println("CAN BUS Shield init fail"); 35 SERIAL.println(" Init CAN BUS Shield again"); 36 delay(100); 37 } 38 SERIAL.println("CAN BUS Shield init ok!"); 39 40 attachInterrupt(digitalPinToInterrupt(interruptPin), MCP2515_ISR, FALLING); // start interrupt 41 42 43 /* 44 * set mask, set both the mask to 0x3ff 45 */ 46 CAN.init_Mask(0, 0, 0x3ff); // there are 2 mask in mcp2515, you need to set both of them 47 CAN.init_Mask(1, 0, 0x3ff); 48 49 50 /* 51 * set filter, we can receive id from 0x04 ~ 0x09 52 */ 53 CAN.init_Filt(0, 0, 0x04); // there are 6 filter in mcp2515 54 CAN.init_Filt(1, 0, 0x05); // there are 6 filter in mcp2515 55 56 CAN.init_Filt(2, 0, 0x06); // there are 6 filter in mcp2515 57 CAN.init_Filt(3, 0, 0x07); // there are 6 filter in mcp2515 58 CAN.init_Filt(4, 0, 0x08); // there are 6 filter in mcp2515 59 CAN.init_Filt(5, 0, 0x09); // there are 6 filter in mcp2515 60 61} 62 63void MCP2515_ISR() 64{ 65 flagRecv = 1; 66} 67 68void loop() 69{ 70 if(flagRecv) // check if get data 71 { 72 73 flagRecv = 0; // clear flag 74 CAN.readMsgBuf(&len, buf); // read data, len: data length, buf: data buf 75 76 SERIAL.println("\r\n------------------------------------------------------------------"); 77 SERIAL.print("Get Data From id: "); 78 SERIAL.println(CAN.getCanId(), HEX); 79 for(int i = 0; i<len; i++) // print the data 80 { 81 SERIAL.print("0x"); 82 SERIAL.print(buf[i], HEX); 83 SERIAL.print("\t"); 84 } 85 SERIAL.println(); 86 87 } 88} 89 90/********************************************************************************************************* 91 END FILE 92*********************************************************************************************************/
###追記
CAN.init_Mask(0, 0, 0x300);
CAN.init_Mask(1, 0, 0x3ff);
マスク関数の引数を上記に変更したところ、受信したIDは以下のようになりました。
この関数の結果、どういった計算で受信できるIDが変化したのか教えてください。
<受信したID>
0x000~0x0ff、0x400~0x4ff
###追記2
マスクとフィルタの演算内容をC言語で書き直してみました。
こんな感じでしょうか?
C
1#include <stdio.h> 2 3#define MASK0 0x3ff 4#define MASK1 0x3ff 5 6#define FILT0 0x004 7#define FILT1 0x005 8#define FILT2 0x006 9#define FILT3 0x007 10#define FILT4 0x008 11#define FILT5 0x009 12 13int main(void) 14{ 15 int cnt = 0; 16 17 printf("<受信可能CAN-ID>\n"); 18 19 for (int id = 0x000; id <= 0x7ff; id++) 20 { 21 if (((MASK0 & FILT0) == (MASK0 & id)) || ((MASK0 & FILT1) == (MASK0 & id))) 22 { 23 printf("%.3x ", id); 24 cnt++; 25 } 26 else if (((MASK1 & FILT2) == (MASK1 & id)) || ((MASK1 & FILT3) == (MASK1 & id)) 27 || ((MASK1 & FILT4) == (MASK1 & id)) || ((MASK1 & FILT5) == (MASK1 & id))) 28 { 29 printf("%.3x ", id); 30 cnt++; 31 } 32 33 if (cnt == 0x10) 34 { 35 printf("\n"); 36 cnt = 0; 37 } 38 } 39 40 char end = getchar(); 41 return 0; 42}
回答3件
あなたの回答
tips
プレビュー



バッドをするには、ログインかつ
こちらの条件を満たす必要があります。
2019/11/15 07:57
退会済みユーザー
2019/11/15 08:32
2019/11/18 12:31
2019/11/18 16:04