くぼみの点を求めるというところが一番むずかしい部分かと思います。
今回はまず局所的な凹凸は無視するため、輪郭を大雑把に近似してから、凸包と比べることでくぼみの点を見つけました。
この部分は凸集合 の解析方法等でもう少し賢いやり方がありそうな気がしますが、思いつきませんでした。
以下サンプルコードです。
サンプルコード
python
1import cv2
2import numpy as np
3from IPython.display import Image, display
4
5
6def imshow(img):
7 ret, img = cv2.imencode('.png', img)
8 display(Image(img))
1 . 画像読み込み
2 . BGR -> グレースケール
3 . 2値化
# 画像読み込み
img = cv2.imread('test.png')
assert img is not None, 'Failed to load image'
# bgr -> grayscale
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 2値化
ret, binary = cv2.threshold(gray, 200, 255, cv2.THRESH_BINARY)
4 . 輪郭を求める
5 . 輪郭を近似する。
6 . 凸包を求める。
python
1def get_contour(binary):
2 # 輪郭抽出
3 contours = cv2.findContours(
4 binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[0]
5 cnt = contours[0] # 1つだけ見つかる前提
6 cnt = cnt.squeeze(axis=1) # (N, 1, 2) -> (N, 2)
7 return cnt
8
9# 輪郭を求める。
10cnt = get_contour(binary)
11# 近似
12arclen = cv2.arcLength(cnt, closed=True)
13approx = cv2.approxPolyDP(cnt, epsilon=0.03 * arclen,
14 closed=True).squeeze(axis=1)
15# 凸包を求める。
16hull = cv2.convexHull(approx).squeeze(axis=1)
17
18
19# 「近似した輪郭の点一覧 - 凸包を構成する点一覧」の差が凹み部分の点 (集合演算)
20diff_points = set(map(tuple, approx)) - set(map(tuple, hull))
21cx, cy = list(diff_points)[0]

輪郭

近似
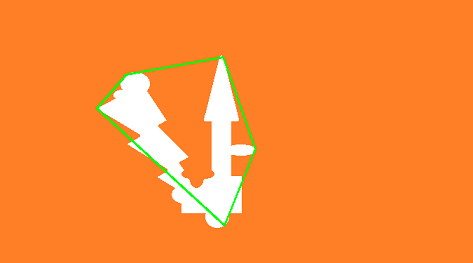
凸包
python
1# 対象領域以外をマスクする。
2block1 = np.zeros_like(binary)
3block1[:cy, :cx] = binary[:cy, :cx]
4
5block2 = np.zeros_like(binary)
6block2[:cy, cx:] = binary[:cy, cx:]
7
8block3 = np.zeros_like(binary)
9block3[cy:] = binary[cy:]
10
11def get_bounding_rect(binary):
12 cnt = get_contour(binary)
13 x, y, w, h = cv2.boundingRect(cnt)
14 return (x, y), (x + w, y + h)
15
16# 各領域を輪郭抽出し、外接矩形を取得する。
17rect1 = get_bounding_rect(block1)
18rect2 = get_bounding_rect(block2)
19rect3 = get_bounding_rect(block3)
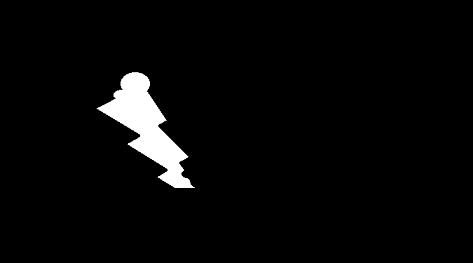
block1

block2

block3
結果を描画
python
1cv2.rectangle(img, rect1[0], rect1[1], color=(255, 255, 0), thickness=2)
2cv2.rectangle(img, rect2[0], rect2[1], color=(0, 255, 255), thickness=2)
3cv2.rectangle(img, rect3[0], rect3[1], color=(255, 0, 255), thickness=2)
4imshow(img)












