

ボールドテキストバイポーラ型とは。
ご質問バイポーラ型のステッピングモータをアルディーノとL6470というモータドライバで動かすための配線とプログラムが知りたいですが、もしお分かりになるようであれば教えていただけないでしょうか。プログラムは複雑なものでなくてよく、正転、逆転だけで良いです。
追記
早速レスを頂いた方、ありがとうございます。基礎知識もない初心者で、仕事上どうしても必要になりこちらでご質問させていただきましたが、解決のために他にどんな情報が必要かもわかっておりません。もしそのあたりも含めてアドバイスいただけると非常に有難いです。よろしくお願いします。
気になる質問をクリップする
クリップした質問は、後からいつでもMYページで確認できます。
またクリップした質問に回答があった際、通知やメールを受け取ることができます。
バッドをするには、ログインかつ
こちらの条件を満たす必要があります。
失礼致しました。ボールドテキストは誤記でしたので削除しました。
2019/06/07 00:02
タグがC#になってます。修正しましょう
2019/06/07 01:15 編集
何かしらの言語の質問であることはタグやこのサイトに投稿されたということで分かるので
タイトルは要件のみを記載してください。
https://teratail.com/help/question-tips#questionTips3-1
2019/06/07 00:46
一応、プログラムに関することの質問サイトなので
配線などは管轄外だと思いますが・・・。
電源については、モーターの仕様にもよるかもしれませんが、別途モーター用の電源も必要かと思います。
配線図はないんですか?
2019/06/07 01:08
あと、タグは「C」と入力すると候補が出てくると思いますよ。
2019/06/07 01:30
>仕事上どうしても必要になり
仕事で必要なことを質問サイトで片づけるのは仕事のやり方しては疑問です。
どうしてもというのでしたら専門の業者や外注するのが確実でしょう。
あなたがやるべきことは仕事の完遂であって、実作業をすることではないのでは。
K.matsuda 様
ご回答ありがとうございます。
買ったコンバーターが壊れてることが確認できたため、電源を取り替えてやり直します。それでダメなら配線図、準備出来次第投稿させていただく予定です。
よろしくお願いします。
回答4件
0
2年前にこのHPを参考に動作できました。
L6470をArduinoで簡単に動かすスケッチ
色々注意点はありますが、希望の範囲はカバーできると思います。(ステッピングモーターの特性で小型のモーターなら簡単。大きいものはL6480で同様に動かせます)
2019年6月12日追加
まず参考ページのL6470をArduinoで簡単に動かすスケッチ
からサンプルのスケッチをダウンロード。解凍する。
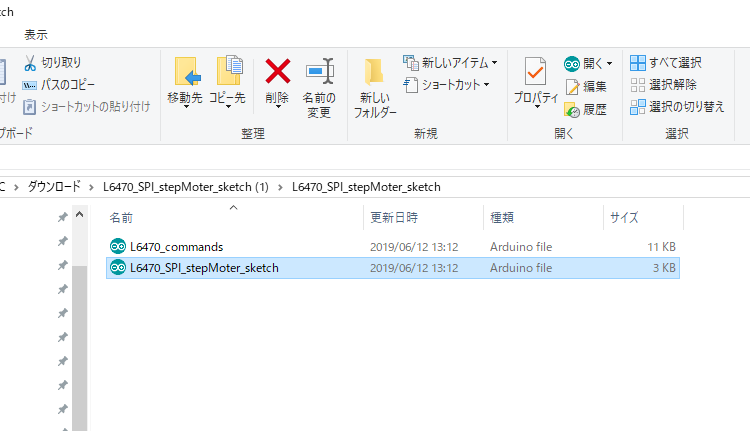
これの’L6470_SPI_stepMoter_sketch'をダブルクリック。
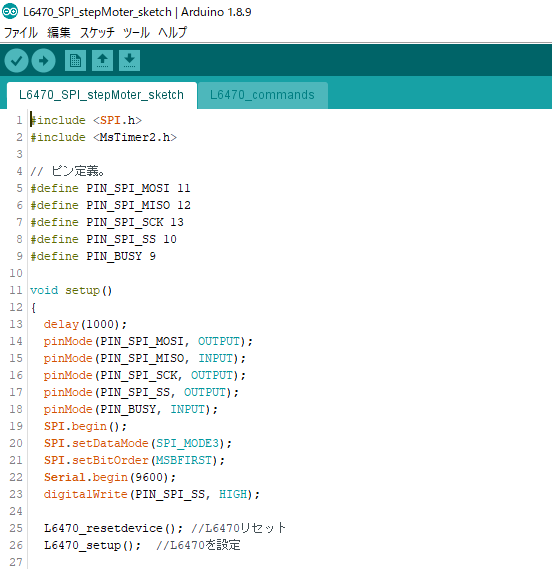
ここで重要なのはスケッチの上を見るとタブが2つに(ここポイント)
これをまずコンパイルされてください。
投稿2019/06/10 01:13
編集2019/06/12 04:26総合スコア3747
バッドをするには、ログインかつ
こちらの条件を満たす必要があります。
![]()
MasahiroHirata様
アドバイスありがとうございます。こちらのサイトを参考にやってみたらエラーが出てしまいコンパイルできません。。
このスレッドに長いプログラムを載せてしまい恐縮なのですが、下記のプログラムがエラーになってしまいます。おそらく基本的なところでつまづいているのだろうなと思うのですが、もし何かお気づきのことがあったら教えて頂けないでしょうか。よろしくお願いいたします。
#include <SPI.h>
//#include <MsTimer2.h>
// ピン定義。
#define PIN_SPI_MOSI 11
#define PIN_SPI_MISO 12
#define PIN_SPI_SCK 13
#define PIN_SPI_SS 10
#define PIN_BUSY 9
void setup()
{
delay(1000);
pinMode(PIN_SPI_MOSI, OUTPUT);
pinMode(PIN_SPI_MISO, INPUT);
pinMode(PIN_SPI_SCK, OUTPUT);
pinMode(PIN_SPI_SS, OUTPUT);
pinMode(PIN_BUSY, INPUT);
SPI.begin();
SPI.setDataMode(SPI_MODE3);
SPI.setBitOrder(MSBFIRST);
Serial.begin(9600);
digitalWrite(PIN_SPI_SS, HIGH);
L6470_resetdevice(); //L6470リセット
L6470_setup(); //L6470を設定
//MsTimer2::set(50, fulash);//シリアルモニター用のタイマー割り込み
//MsTimer2::start();
delay(4000);
L6470_move(1,1600);//指定方向に指定数ステップする
L6470_busydelay(5000); //busyフラグがHIGHになってから、指定ミリ秒待つ。
L6470_run(0,10000);//指定方向に連続回転
delay(6000);
L6470_softstop();//回転停止、保持トルクあり
L6470_busydelay(5000);
L6470_goto(0x6789);//指定座標に最短でいける回転方向で移動
L6470_busydelay(5000);
L6470_run(0,0x4567);
delay(6000);
L6470_hardhiz();//回転急停止、保持トルクなし
}
void loop(){
}
void L6470_setup(){
L6470_setparam_acc(0x40); //[R, WS] 加速度default 0x08A (12bit) (14.55*val+14.55[step/s^2])
L6470_setparam_dec(0x40); //[R, WS] 減速度default 0x08A (12bit) (14.55*val+14.55[step/s^2])
L6470_setparam_maxspeed(0x40); //[R, WR]最大速度default 0x041 (10bit) (15.25*val+15.25[step/s])
L6470_setparam_minspeed(0x01); //[R, WS]最小速度default 0x000 (1+12bit) (0.238*val[step/s])
L6470_setparam_fsspd(0x3ff); //[R, WR]μステップからフルステップへの切替点速度default 0x027 (10bit) (15.25*val+7.63[step/s])
L6470_setparam_kvalhold(0x50); //[R, WR]停止時励磁電圧default 0x29 (8bit) (Vs[V]*val/256)
L6470_setparam_kvalrun(0x50); //[R, WR]定速回転時励磁電圧default 0x29 (8bit) (Vs[V]*val/256)
L6470_setparam_kvalacc(0x50); //[R, WR]加速時励磁電圧default 0x29 (8bit) (Vs[V]*val/256)
L6470_setparam_kvaldec(0x50); //[R, WR]減速時励磁電圧default 0x29 (8bit) (Vs[V]*val/256)
L6470_setparam_stepmood(0x03); //ステップモードdefault 0x07 (1+3+1+3bit)
}
void fulash(){
Serial.print("0x");
Serial.print( L6470_getparam_abspos(),HEX);
Serial.print(" ");
Serial.print("0x");
Serial.println( L6470_getparam_speed(),HEX);
}
これをコンパイルしてエラーは
sketch_jun12a:25:19: error: 'L6470_resetdevice' was not declared in this scope
L6470_resetdevice(); //L6470リセット
^
sketch_jun12a:32:18: error: 'L6470_move' was not declared in this scope
L6470_move(1,1600);//指定方向に指定数ステップする
^
sketch_jun12a:33:21: error: 'L6470_busydelay' was not declared in this scope
L6470_busydelay(5000); //busyフラグがHIGHになってから、指定ミリ秒待つ。
^
sketch_jun12a:34:18: error: 'L6470_run' was not declared in this scope
L6470_run(0,10000);//指定方向に連続回転
^
sketch_jun12a:36:16: error: 'L6470_softstop' was not declared in this scope
L6470_softstop();//回転停止、保持トルクあり
^
sketch_jun12a:38:18: error: 'L6470_goto' was not declared in this scope
L6470_goto(0x6789);//指定座標に最短でいける回転方向で移動
^
sketch_jun12a:42:15: error: 'L6470_hardhiz' was not declared in this scope
L6470_hardhiz();//回転急停止、保持トルクなし
^
C:\Users\hirata\Documents\Arduino\sketch_jun12a\sketch_jun12a.ino: In function 'void L6470_setup()':
sketch_jun12a:49:24: error: 'L6470_setparam_acc' was not declared in this scope
L6470_setparam_acc(0x40); //[R, WS] 加速度default 0x08A (12bit) (14.55*val+14.55[step/s^2])
^
sketch_jun12a:50:24: error: 'L6470_setparam_dec' was not declared in this scope
L6470_setparam_dec(0x40); //[R, WS] 減速度default 0x08A (12bit) (14.55*val+14.55[step/s^2])
^
sketch_jun12a:51:29: error: 'L6470_setparam_maxspeed' was not declared in this scope
L6470_setparam_maxspeed(0x40); //[R, WR]最大速度default 0x041 (10bit) (15.25*val+15.25[step/s])
^
sketch_jun12a:52:29: error: 'L6470_setparam_minspeed' was not declared in this scope
L6470_setparam_minspeed(0x01); //[R, WS]最小速度default 0x000 (1+12bit) (0.238*val[step/s])
^
sketch_jun12a:53:27: error: 'L6470_setparam_fsspd' was not declared in this scope
L6470_setparam_fsspd(0x3ff); //[R, WR]μステップからフルステップへの切替点速度default 0x027 (10bit) (15.25*val+7.63[step/s])
^
sketch_jun12a:54:29: error: 'L6470_setparam_kvalhold' was not declared in this scope
L6470_setparam_kvalhold(0x50); //[R, WR]停止時励磁電圧default 0x29 (8bit) (Vs[V]*val/256)
^
sketch_jun12a:55:28: error: 'L6470_setparam_kvalrun' was not declared in this scope
L6470_setparam_kvalrun(0x50); //[R, WR]定速回転時励磁電圧default 0x29 (8bit) (Vs[V]*val/256)
^
sketch_jun12a:56:28: error: 'L6470_setparam_kvalacc' was not declared in this scope
L6470_setparam_kvalacc(0x50); //[R, WR]加速時励磁電圧default 0x29 (8bit) (Vs[V]*val/256)
^
sketch_jun12a:57:28: error: 'L6470_setparam_kvaldec' was not declared in this scope
L6470_setparam_kvaldec(0x50); //[R, WR]減速時励磁電圧default 0x29 (8bit) (Vs[V]*val/256)
^
sketch_jun12a:59:29: error: 'L6470_setparam_stepmood' was not declared in this scope
L6470_setparam_stepmood(0x03); //ステップモードdefault 0x07 (1+3+1+3bit)
^
C:\Users\hirata\Documents\Arduino\sketch_jun12a\sketch_jun12a.ino: In function 'void fulash()':
sketch_jun12a:64:37: error: 'L6470_getparam_abspos' was not declared in this scope
Serial.print( L6470_getparam_abspos(),HEX);
^
sketch_jun12a:67:38: error: 'L6470_getparam_speed' was not declared in this scope
Serial.println( L6470_getparam_speed(),HEX);
^
exit status 1
'L6470_resetdevice' was not declared in this scope
’
です。
一つずつ丹念につぶしましょう。
まずは http://spinelify.blog.fc2.com/blog-entry-41.html からスケッチをダウンロード。
基の回答を修正しました。ご参考まで。
0
それそのまま、「L6470」でぐぐると、Arduinoと接続する記事が引っかかりますが、これではダメでしょうか
投稿2019/06/07 00:04
総合スコア87774
バッドをするには、ログインかつ
こちらの条件を満たす必要があります。
![]()
y_waiwaiさま
ご回答ありがとうございます。
試してみたのですが、アルディーノの5Vだけでも動くのか電池とかDCコンバータみたいな別電源が必要なのかがわかりませんでした。。
また、タグ修正のご指摘もありがとうございます。サイト初心者でC言語タブを見つけるのに時間かかっておりますが、修正させていただきます。
モータの定格を調べてください。12V必要なモータなら12Vの電源を用意する必要があります
たとえ、モータが5Vだとしても、USBの電源では、電流が足りないため動かせません
必ず、モータ用に別に電源を用意しましょう
アドバイスありがとうございます。
実は、DCコンバーター壊れてたことが判明したため新しいのを買ってこれからやってみるところなのです。。なかなか作業が進まず、回答が遅れて大変失礼いたしました。
あなたの回答
tips
太字
斜体
打ち消し線
見出し
引用テキストの挿入
コードの挿入
リンクの挿入
リストの挿入
番号リストの挿入
表の挿入
水平線の挿入
プレビュー
質問の解決につながる回答をしましょう。 サンプルコードなど、より具体的な説明があると質問者の理解の助けになります。 また、読む側のことを考えた、分かりやすい文章を心がけましょう。


