

前提・実現したいこと
最終的には、固定器具にがっちり固定され、覆われているカメラのキャリブレーションを行うプログラムが作りたいです。
しかし、カメラは固定器具に固定されているため、チェッカーパターンを複数の角度から撮影することが出来ません。
また、カメラと被写体は一体化しているように覆われているため、カメラと被写体の間に何か(例えばチェッカーパターン)を挿入することも出来ません。
そこで、こういった状況でキャリブレーションを行いたく、色々考えてみました。
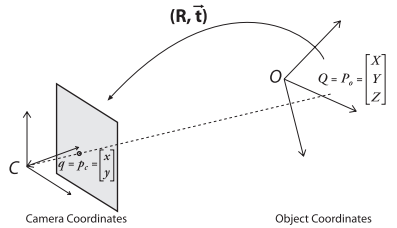
1,カメラを固定器具に固定する前に、外で通常のZhangのキャリブレーションを行い、内部パラメータ(と外部パラメータ)を推定します。
2,カメラを固定後、1で求めた内部パラメータを用いて何らかの方法で、固定状態の外部パラメータを推定します。
内部パラメータとは、カメラ内部の固有の値なので、外でキャリブレーションを行っても大丈夫だと考えました。
そして、固定後に、カメラの位置や姿勢といった情報である外部パラメータを推定すればいいのではないかと考えました
カメラと被写体の間には一枚の薄いガラス板があり、そこに例えばチェッカーパターンを書いておくことは出来ます。
そのチェッカーパターンと、事前に求めた内部パラメータを使って外部パラメータを求められるのではないかと考えました。
以上のようなことは可能なのでしょうか?
可能であれば、その方法など、詳しくおしえていただけないでしょうか。
ネットで頑張って調べてはみたのですが、皆様Zhangの方法を使って内部パラメータと外部パラメータを同時に推定する方法について紹介しており
初心者の私にはそれ以上のことはわかりませんでした。
お詳しい方いらっしゃいましたら、アドバイスをお願いいたします。
補足情報(FW/ツールのバージョンなど)
Windows10を使っていますが、Windows7のPCもあります。
VisualStudio2017を使っています。
OpenCVは、3.4.2を使っています。
回答1件
あなたの回答
tips
プレビュー



バッドをするには、ログインかつ
こちらの条件を満たす必要があります。
2018/10/13 07:45
2018/10/13 07:48
2018/10/13 08:17
2018/10/13 11:20 編集
2018/10/13 16:06
2018/10/15 01:32
2018/10/16 08:59
2018/10/16 09:40 編集
2018/10/16 09:46
2018/10/16 10:07
2018/10/16 10:11 編集
2018/10/17 09:13
2018/10/17 09:47
2018/10/17 09:50
2018/10/17 09:55
2018/10/17 10:16
2018/10/18 03:37
2018/10/18 07:44
2018/10/18 07:45